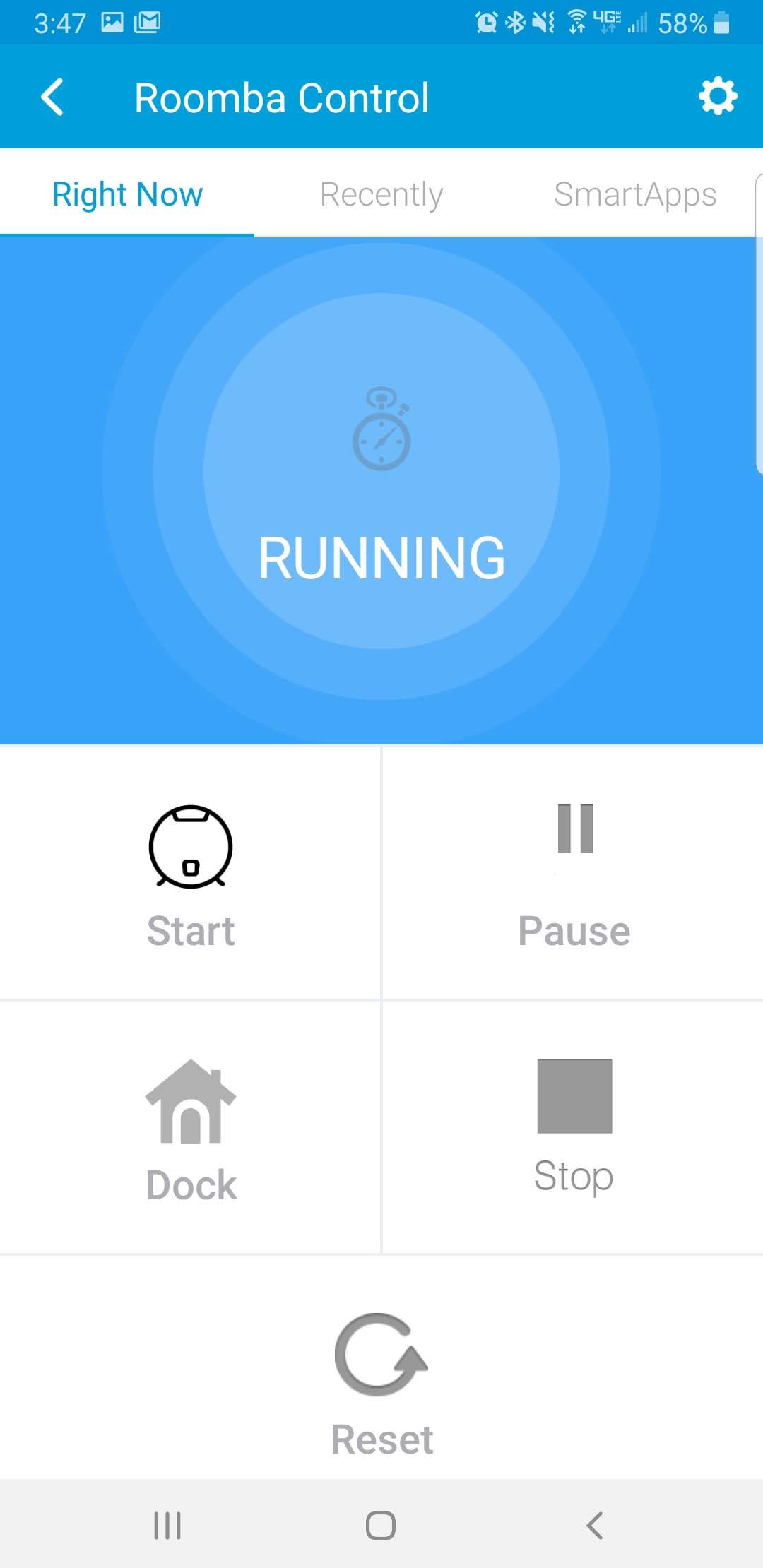
My apologizes for the delay. I tweaked the code a bit, UI is slightly different than above) but then iFTT started causing some headaches. It show receipt of the webhook trigger but the applets were significantly delayed, by hours at times. I eventually dumped it all and re-tried rest980. Good news is that it is working for local control only.
Regardless, the final version before I dumped iFTT is below, you’ll noticed that I bypassed webCore and and am using a http get command to send the webhook directly. Each user will have to create iFTT applets (webHooks–>iRobot) for start, stop, pause, and dock. Those webhooks and the user’s webhook key is entered into the DH settings.
Additionally, for the feedback mechanisms, three iRobot–>SmartThings applets will be needed. Turn on the device switch when iRobot starts, lock the device upon mission complete, and sound alarm (strobe) when error occurs. These feedback mechanisms should still occur even if iRobot is started by other means so you can check status in smartThings at any time.
It is time consuming to setup the iFTT portion but it was working before iFTT decided to be a pain. I even contacted help on both ends, iFTT and iRobot. They blamed each other…
Other notes: I added a motion secondary control to the multi-attribute tile. This is purely simulated and indicates active cleaning vs docked. Due to the nature of the “new” app, I chose motion and a vid of generic-sensor. You cannot control iRobot via the new app but you can see if motion is active aka cleaning.
/**
*/
preferences {
section(“WebHook Command Input”){
input “start_command”, “text”, title: “Start Command”, required: false
input “pause_command”, “text”, title: “Pause Command”, required: false
input “stop_command”, “text”, title: “Stop Command”, required: false
input “dock_command”, “text”, title: “Dock Command”, required: false
input “key”, “password”, title: “iFTT Maker Key”, required: true
}
}
metadata {
definition (name: “Roomba Control via iFTT”, namespace: “SmartThingsDHs”, author: “fieldsjm”, mnmn: “SmartThings”, vid: “generic-sensor”) {
capability “Actuator”
capability “Alarm”
capability “Button”
capability “Lock”
capability “Sensor”
capability “Switch”
capability “motionSensor”
capability “Health Check”
command "push1"
command "push2"
command "push3"
command "push4"
command "push5"
}
simulator {
}
tiles (scale: 2){
/Status tile based on intended action/
multiAttributeTile(name:“status”, type: “generic”, width: 6, height: 4){
tileAttribute (“device.status”, key: “PRIMARY_CONTROL”) {
attributeState (“Ready”, label: “Ready”, icon:“st.samsung.da.RC_ic_rc”, backgroundColor:“#8CFC03”)
attributeState (“Running”, label: “In-Process”, icon:“st.Health & Wellness.health7”, backgroundColor:“#078bf7”)
attributeState (“Paused”, label: “Paused”, icon:“http://cdn.device-icons.smartthings.com/sonos/pause-icon@2x.png”, backgroundColor:“#FC030F”)
attributeState (“Docking”, label: “Docking”, icon:“st.presence.house.unlocked”, backgroundColor:“#5F07F7”)
attributeState (“Docked”, label: “Docked”, icon:“st.presence.house.secured”, backgroundColor:“#5F07F7”)
attributeState (“Stopped”, label: “Stopped”, icon:“https://raw.githubusercontent.com/fieldsjm/Resources/master/stop.png”, backgroundColor:“#FC030F”)
attributeState (“Ended”, label: “Complete”, icon:“st.samsung.da.RC_ic_rc”, backgroundColor:“#8CFC03”)
attributeState (“Error”, label: “Error”, icon:“https://raw.githubusercontent.com/fieldsjm/Resources/master/warning.png”, backgroundColor:“#FC030F”)
}
tileAttribute(“device.motion”, key: “SECONDARY_CONTROL”) {
attributeState (“active”, label: “Cleaning”)
attributeState (“inactive”, label: “Docked”)
}
}
/Start/
standardTile(“push1”, “device.button”, width: 3, height: 2, decoration: “flat”) {
state “default”, label: “Start”, icon:“st.samsung.da.RC_ic_rc”, backgroundColor: “#ffffff”, action: “push1”
}
/Pause/
standardTile(“push2”, “device.button”, width: 3, height: 2, decoration: “flat”) {
state “default”, label: “”, icon:“st.sonos.pause-btn”, backgroundColor: “#ffffff”, action: “push2”
}
/Dock/
standardTile(“push3”, “device.button”, width: 3, height: 2, decoration: “flat”) {
state “default”, label: “Dock”, icon:“st.nest.nest-home”, backgroundColor: “#ffffff”, action: “push3”
}
/Stop/
standardTile(“push4”, “device.button”, width: 3, height: 2, decoration: “flat”) {
state “default”, label: “”, icon:“st.sonos.stop-btn”, backgroundColor: “#ffffff”, action: “push4”
}
/Reset/
standardTile(“push5”, “device.button”, width: 6, height: 2, decoration: “flat”) {
state “default”, label: “Reset”, icon:“st.secondary.refresh-icon”, backgroundColor: “#ffffff”, action: “push5”
}
/Switch for IFTT feedback of Started - Hidden by default/
standardTile(“switch”, “device.switch”, inactiveLabel: false, width: 6, height: 2, decoration: “flat”){
state(“off”, label: “Ready”, action: “switch.on”, backgroundColor: “#ffffff”, nextState: “on”, defaultState: “true”)
state(“on”, label: “Cleaning”, action: “switch.off”, backgroundColor: “#00a0dc”, nextState: “off”)
}
/Alarm for IFTT feedback of Error - Hidden by default/
standardTile(“alarm”, “device.alarm”, inactiveLabel: false, width: 6, height: 2, decoration: “flat”) {
state(“off”, label:“Ready / Pending”, action:‘alarm.strobe’, icon:“st.alarm.alarm.alarm”, backgroundColor:“#ffffff”, nextState: “strobe”, defaultState: “true”)
state(“strobe”, label:“Error”, action:‘alarm.off’, icon:“st.alarm.alarm.alarm”, backgroundColor:“#e86d13”, nextState: “off”)
}
/Lock for IFTT feedback of mission complete - Hidden by default/
standardTile(“lock”, “device.lock”, inactiveLabel: false, width: 6, height: 2, decoration: “flat”){
state(“unlocked”, label: “Ready / Pending”, action: “lock.lock”, backgroundColor: “#ffffff”, nextState: “locked”, defaultState: “true”)
state(“locked”, label: “Mission Complete”, action: “lock.unlock”, backgroundColor: “#00a0dc”, nextState: “unlocked”)
}
main "status"
details(["status","push1","push2","push3","push4","push5", /*"switch","alarm","lock"*/])
}
}
def parse(String description) {
}
/Start - Sends iFTT Webhook - if Roomba starts successfully, iFTT will turn on switch/
def push1() {
push(1)
def cmd = "https://maker.ifttt.com/trigger/${settings.start_command}/with/key/${settings.key}";
log.debug "Sending request cmd[${cmd}]"
httpGet(cmd) {resp ->
if (resp.data) {
log.info "${resp.data}"
}
}
sendHubCommand(result)
log.debug “Executing push1”
log.debug result
}
/Pause - Sends iFTT Webhook - no feedback available/
def push2() {
push(2)
sendEvent(name: “status”, value: “Paused”)
sendEvent(name: “motion”, value: “active”)
def cmd = "https://maker.ifttt.com/trigger/${settings.pause_command}/with/key/${settings.key}";
log.debug "Sending request cmd[${cmd}]"
httpGet(cmd) {resp ->
if (resp.data) {
log.info "${resp.data}"
}
}
sendHubCommand(result)
log.debug “Executing push1”
log.debug result
}
/Dock - Sends iFTT Webhook - minimal feedback available, once docked iFTT will also send docking mission complete (fail safe of conversational delay to Docked then Ready Status)/
def push3() {
push(3)
sendEvent(name: “status”, value: “Docking”)
sendEvent(name: “motion”, value: “active”)
runIn(60, docked)
def cmd = "https://maker.ifttt.com/trigger/${settings.dock_command}/with/key/${settings.key}";
log.debug "Sending request cmd[${cmd}]"
httpGet(cmd) {resp ->
if (resp.data) {
log.info "${resp.data}"
}
}
sendHubCommand(result)
log.debug “Executing push1”
log.debug result
}
def docked() {
sendEvent(name: “status”, value: “Docked”)
sendEvent(name: “motion”, value: “inactive”)
runIn(10, push5)
}
/Stop - Sends iFTT Webhook - no feedback available/
def push4() {
push(4)
sendEvent(name: “status”, value: “Stopped”)
sendEvent(name: “motion”, value: “active”)
def cmd = "https://maker.ifttt.com/trigger/${settings.stop_command}/with/key/${settings.key}";
log.debug "Sending request cmd[${cmd}]"
httpGet(cmd) {resp ->
if (resp.data) {
log.info "${resp.data}"
}
}
sendHubCommand(result)
log.debug “Executing push1”
log.debug result
}
/Status Reset/
def push5() {
push(5)
unlock()
off()
sendEvent(name: “status”, value: “Ready”)
sendEvent(name: “motion”, value: “inactive”)
}
private push(button) {
log.debug “$device.displayName button $button was pushed”
sendEvent(name: “button”, value: “pushed”, data: [buttonNumber: button], descriptionText: “$device.displayName button $button was pushed”, isStateChange: true)
}
/Feedback Mechanisms/
/Started - iFTT turns on if Roomba starts successfully/
def on(){
sendEvent(name: “switch”, value: “on”)
sendEvent(name: “status”, value: “Running”)
sendEvent(name: “motion”, value: “active”)
log.debug “$device.displayName (iFTT) has reported starting”
}
def off(){
sendEvent(name: “switch”, value: “off”)
sendEvent(name: “alarm”, value: “off”)
sendEvent(name: “status”, value: “Ready”)
sendEvent(name: “motion”, value: “inactive”)
}
/Misson Complete - iFTT turns on if Roomba completes task/
def lock() {
sendEvent(name: “lock”, value: “locked”)
sendEvent(name: “status”, value: “Ended”)
sendEvent(name: “motion”, value: “inactive”)
log.debug “$device.displayName (iFTT) has reported misson complete”
}
def unlock() {
sendEvent(name: “lock”, value: “unlocked”)
sendEvent(name: “status”, value: “Ready”)
sendEvent(name: “motion”, value: “inactive”)
}
/Error - iFTT turns on if Roomba encounters an error (stuck, low battery, etc)/
def strobe() {
sendEvent(name: “alarm”, value: “strobe”)
sendEvent(name: “status”, value: “Error”)
sendEvent(name: “motion”, value: “active”)
log.debug “$device.displayName (iFTT) has reported an error”
}
def installed() {
initialize()
}
def updated() {
initialize()
}
def initialize() {
sendEvent(name: “numberOfButtons”, value: 5)
sendEvent(name: “status”, value: “Ready”)
sendEvent(name: “motion”, value: “inactive”)
sendEvent(name: “healthStatus”, value: “online”)
}








{kind=link}
{kind=link}
{kind=link}